24年5月21日广东工业大学陈新&陈云教授团队在《Nature Communications》(影响因子:16.6)中发表最新研究论文,“Lightweight and drift-free magnetically actuated millirobots via asymmetric laser-induced graphene”。研究通过在激光诱导的聚合物到石墨烯转换过程中引入不对称光图案失真来开发一系列基于石墨烯的螺旋微型机器人;这种变形导致石墨烯片从聚合物基板上自发扭曲和剥离。
研究团队在激光诱导聚合物到石墨烯的转换过程中引入非对称畸变,从而加工出形状可控的螺旋状石墨烯片;基于此进一步开发出运动速度快、运动路径精准且无偏移的轻质磁驱动微机器人,并通过活体实验展示了该类微机器人在载药靶向治疗方面的能力。
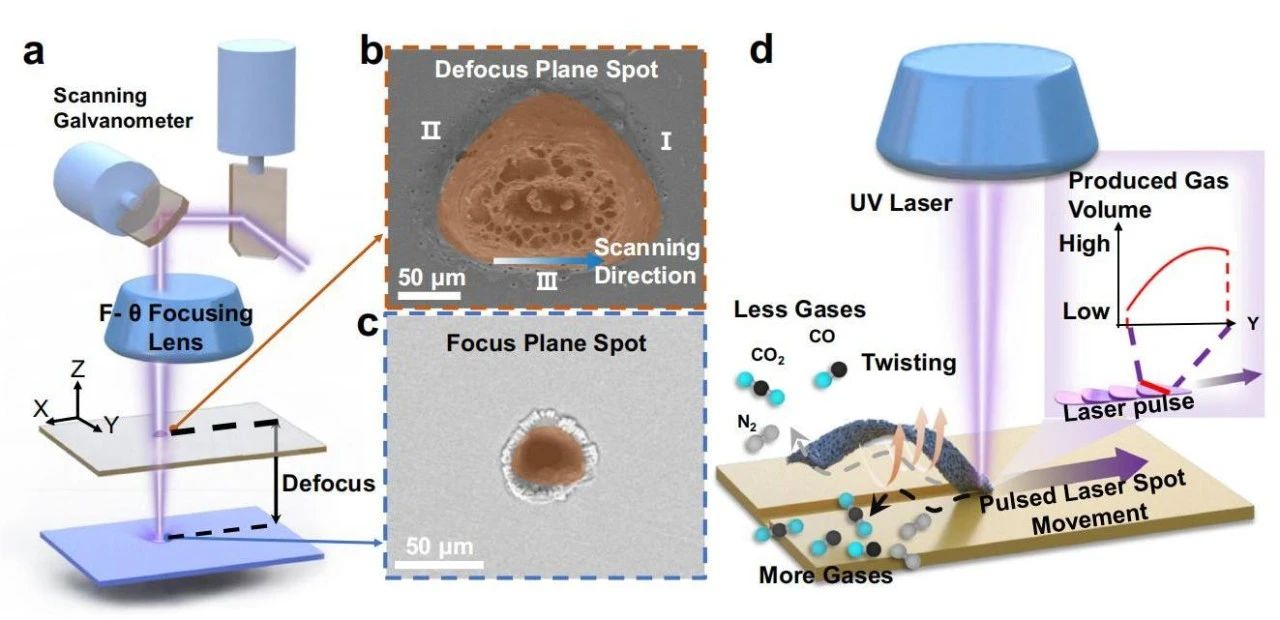
创新的制造技术:通过不对称激光诱导石墨烯(LIG)过程,实现了从聚合物基底上剥离并卷曲成螺旋形状的石墨烯片,这种方法具有高吞吐量和可控性。
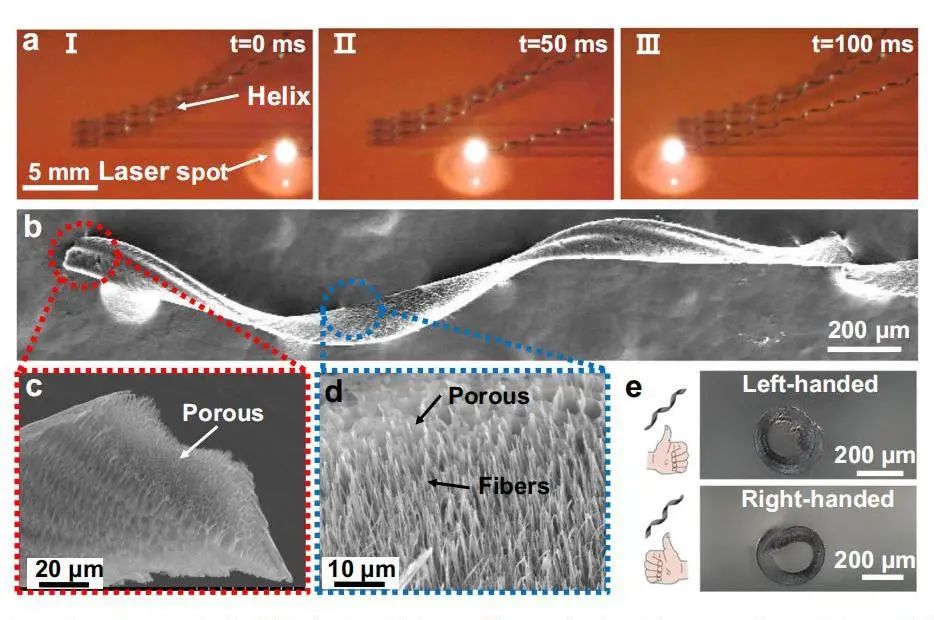
图2.多孔螺旋LIG片的加工与表征
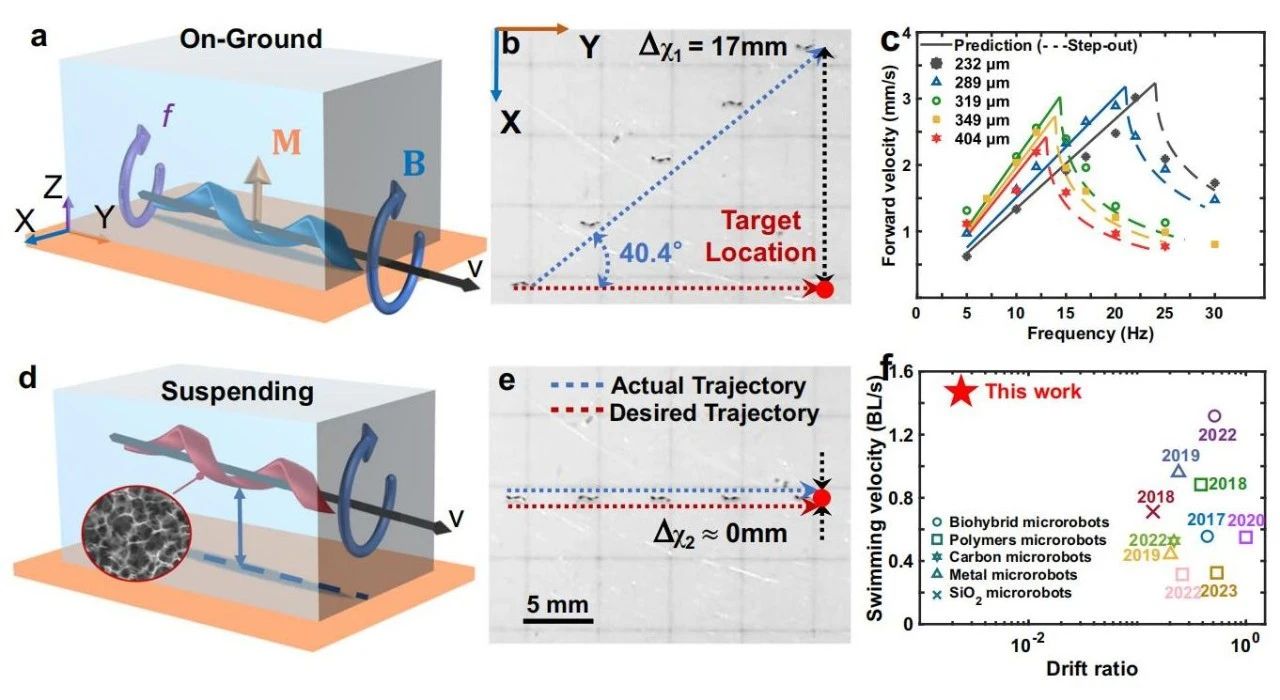
轻量化和无漂移设计:所制造的微型机器人具有低密度和高表面疏水性,能够在液体中实现完全悬浮,从而在运动过程中几乎不产生横向漂移。
图3.悬挂时具有不同状态和特性的GH毫米机器人示意图
高速运动能力:镍涂层的石墨烯基螺旋微型机器人展示了快速运动的能力,其游泳速度高达每秒2.64个身体长度。
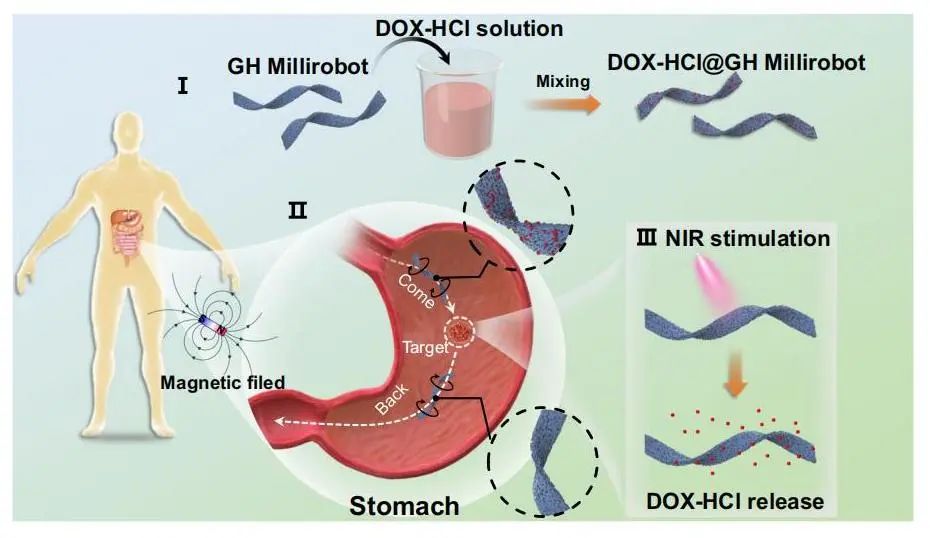
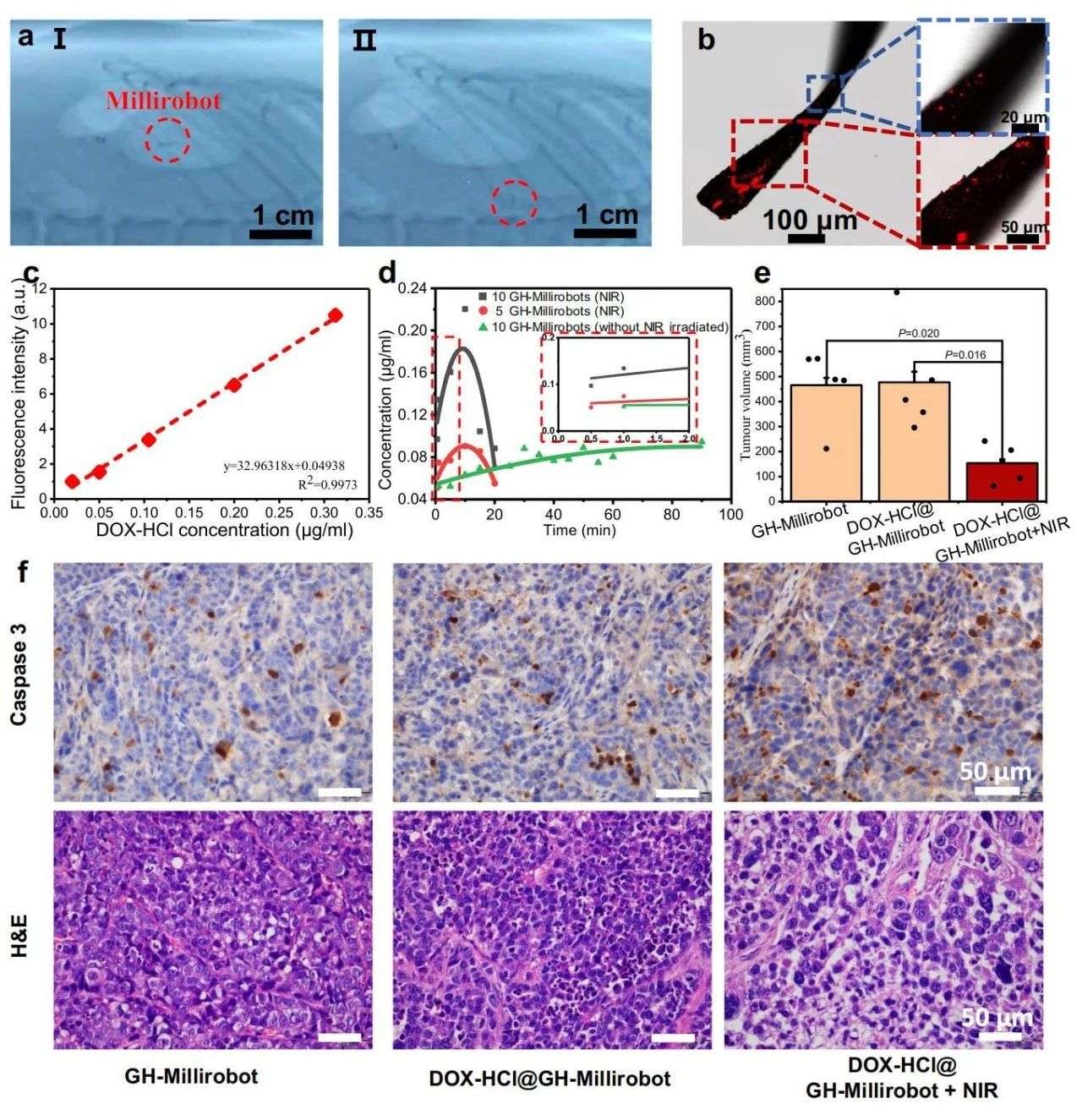
精确的药物输送:微型机器人能够实现精确的药物装载和按需释放,特别是通过近红外(NIR)辐射触发的抗癌药物释放。
高通量生产潜力:研究展示了每秒可制造77个微型机器人支架的能力,表明了其在大规模生产方面的潜力。
成本效益:由于制造速度快且原材料成本低,每个微型机器人的成本可以控制在极低水平,低于一分钱美元。
多功能性:这些微型机器人不仅适用于药物输送,还具有在其他领域如污染物清理和传感应用中的潜在用途。
图5.GH毫米机器人的药物递送和释放
这项研究展示了石墨烯基微型机器人在医疗和生物工程领域应用的巨大潜力,特别是在提高药物输送效率和精确度方面,标志着微型机器人技术的重大进步,为未来医疗健康和环境科学开辟了新道路。
 首页
首页