 首页
首页



进入店铺
广工大研究院技术研发部




 应用分类:检测应用
应用分类:检测应用
 应用行业:五金制品、建材家居
应用行业:五金制品、建材家居
 案例地址:广东省佛山市南海区
案例地址:广东省佛山市南海区
 发布时间:2024-05-27
发布时间:2024-05-27
价格:面议
收藏
 1116
1116
立即雇佣他
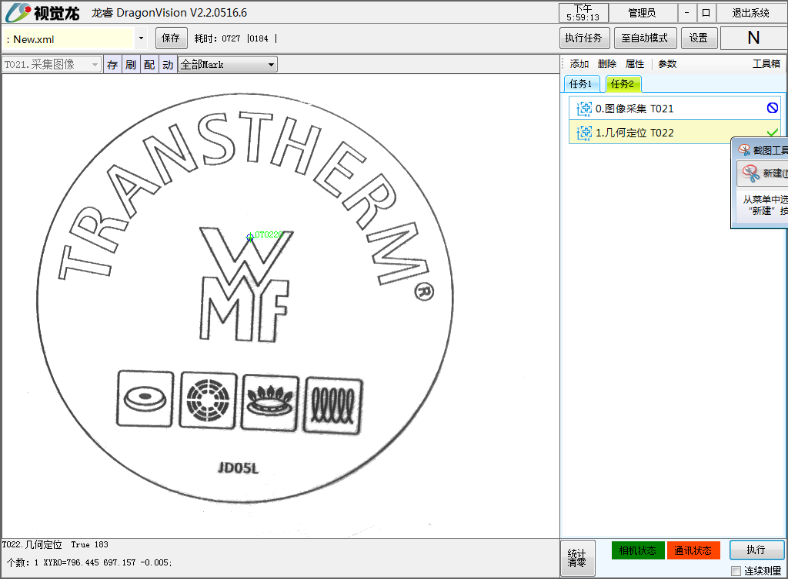
钢锅的生产过程中,需要对锅耳进行精确焊接。所以首先得对钢锅进行精确定位,再通过焊接机械手对锅耳进行焊接。企业的要求是钢锅在传送带上流动,机械手根据锅底logo定位抓取钢锅,对钢锅进行精确锅耳焊接。具体的细节需求是两个钢锅传送带间隔距离400mm,单个锅的传送带滞留时间为6s,抓取位视觉处理时间需要控制在1s以内。相机安装高度需在600mm以上,角度精度为±0.5°,水平精度±0.25mm,需保证产品在拍照视野范围内存在前后左右10mm位移偏差也能精确定位。平台应企业的要求,制定了相应视觉方案,开发了相应的视觉算法及软件。算法实际处理时间小于600ms,检测识别准确率可达98%。
